IQ-Learn: Inverse soft-Q Learning for Imitation
|
In NeurIPS 2021 (Spotlight)
|

|
|
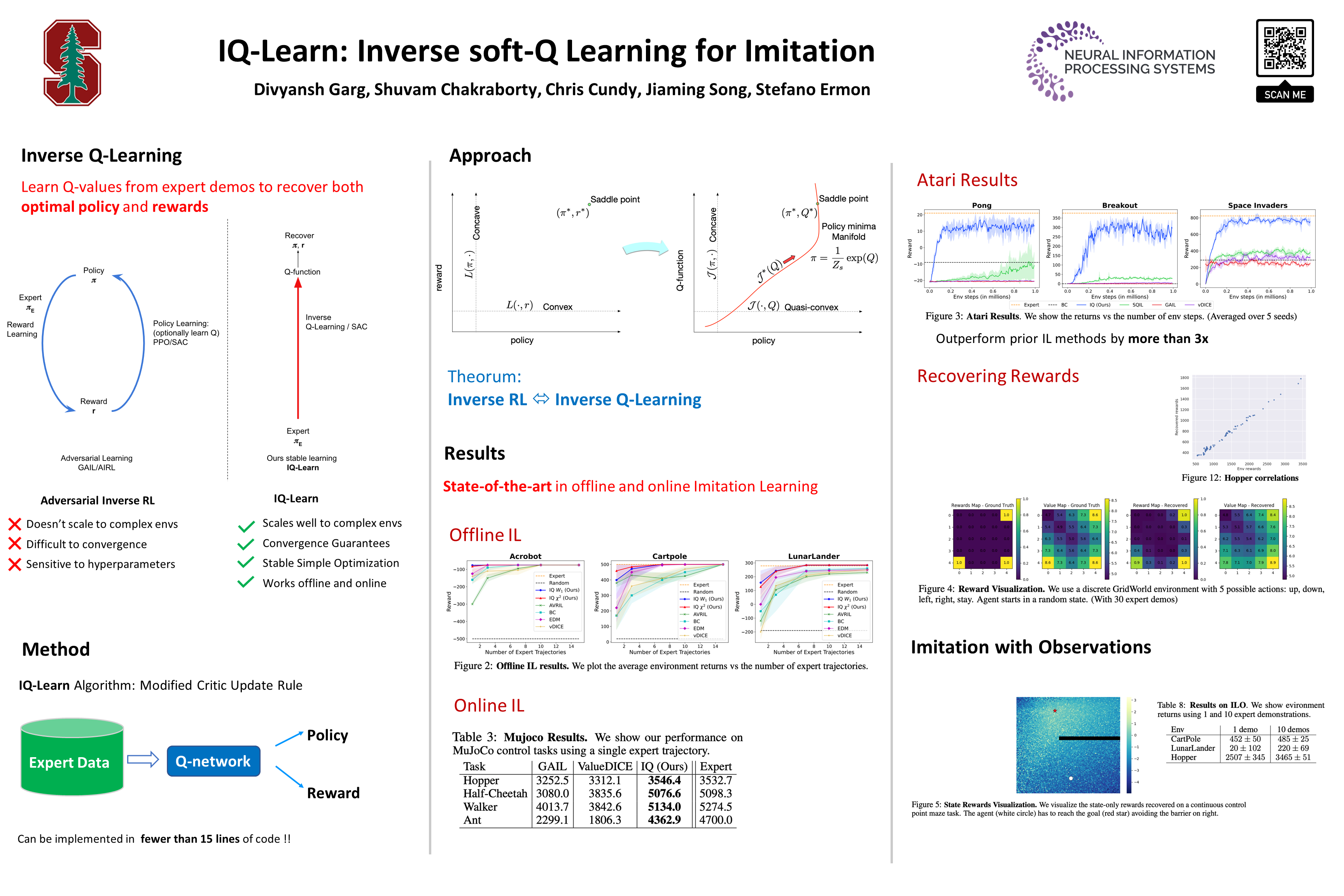
IQ-Learn reaching human performance on Atari through
pure imitation
Showing Pong (Top
Left),
Breakout (Top Right), Space
Invaders (Bottom Left) ,
QBert (Bottom Right).
|
Abstract
In many sequential decision-making problems (e.g., robotics control, game playing, sequential prediction), human
or expert data is available containing useful information about the task. However, imitation learning (IL) from
a small amount of expert data can be challenging in high-dimensional environments with complex dynamics.
Behavioral cloning is a simple method that is widely used due to its simplicity of implementation and stable
convergence but doesn't utilize any information involving the environment's dynamics. Many existing methods that
exploit dynamics information are difficult to train in practice due to an adversarial optimization process over
reward and policy approximators or biased, high variance gradient estimators.
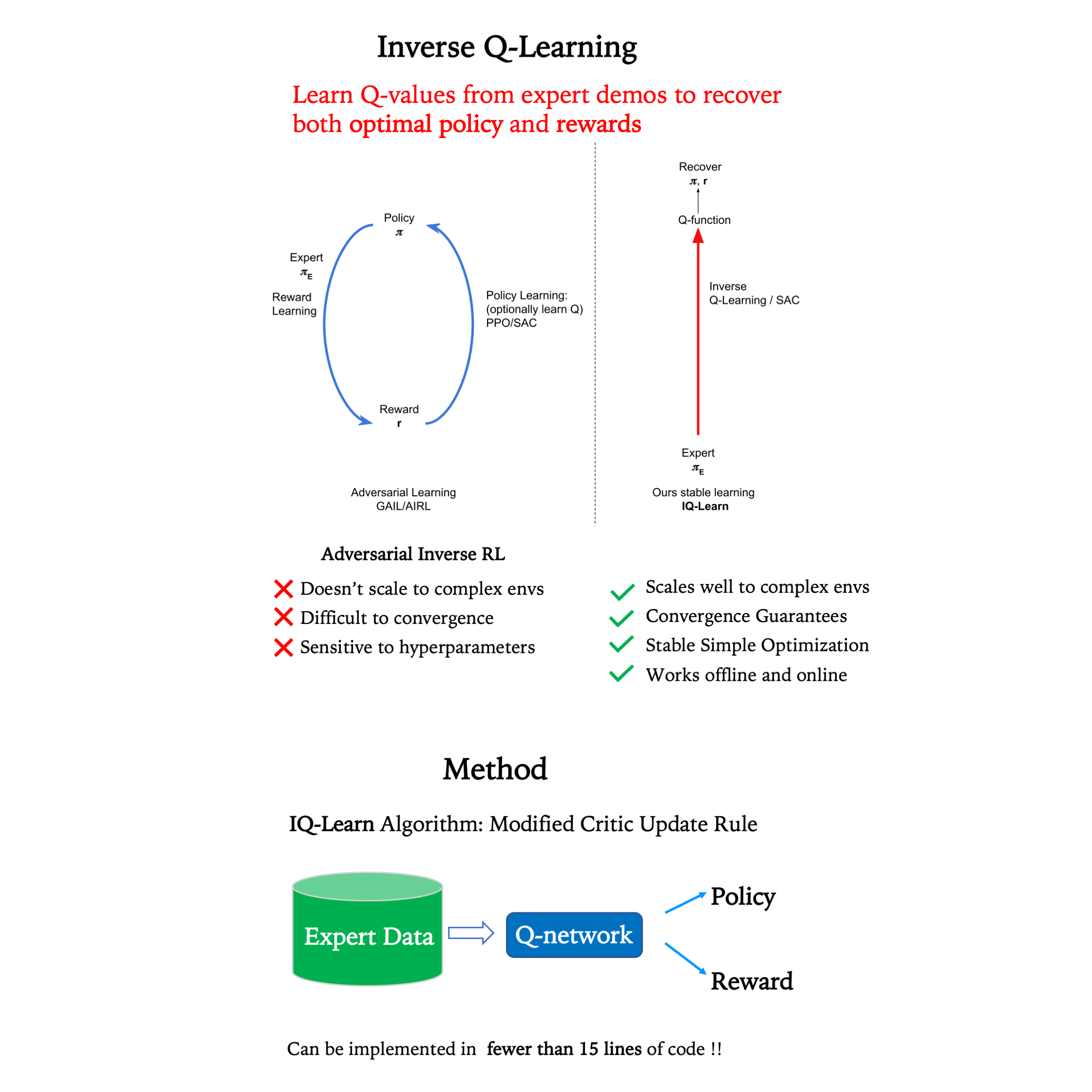
We introduce a method for
dynamics-aware IL which avoids adversarial training by learning a single Q-function, implicitly
representing
both reward and policy. On standard benchmarks, the implicitly learned rewards show a high positive correlation
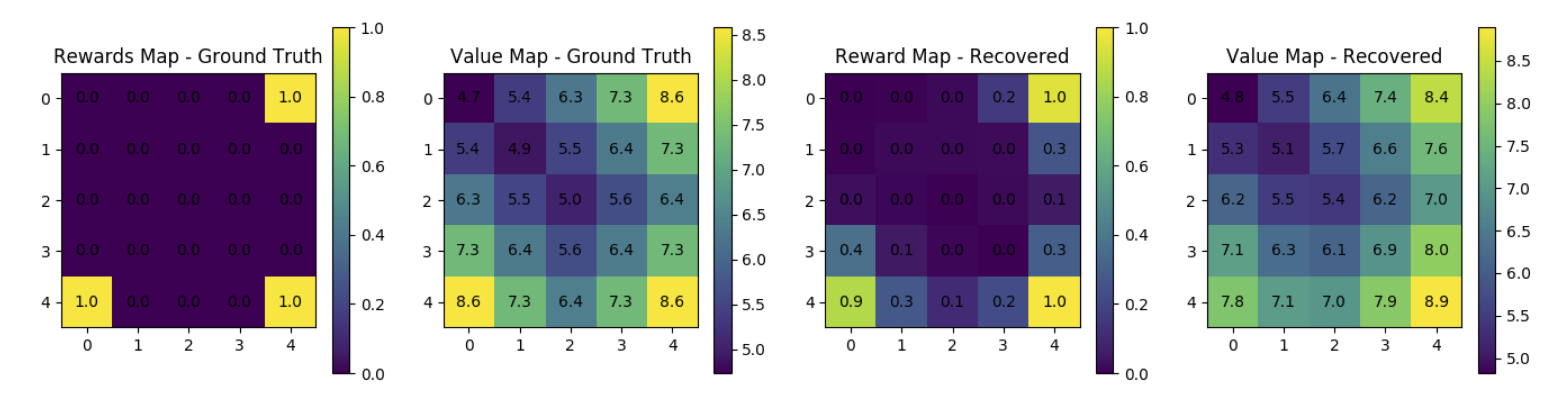
with the ground-truth rewards, illustrating our method can also be used for inverse reinforcement learning
(IRL). Our method, Inverse soft-Q learning (IQ-Learn)
obtains
state-of-the-art results in
offline and
online
imitation learning settings, significantly outperforming existing methods both in the number of required
environment interactions and scalability in high-dimensional spaces, often by more than 3X.
Video
Approach
[GitHub]
Recovering Rewards
Recovering environment rewards on a discrete GridWorld environment with 5 possible actions: up, down,
left, right, stay
Paper
Poster
Citation
@inproceedings{
garg2021iqlearn,
title={IQ-Learn: Inverse soft-Q Learning for Imitation},
author={Divyansh Garg and Shuvam Chakraborty and Chris Cundy and Jiaming Song and Stefano Ermon},
booktitle={Thirty-Fifth Conference on Neural Information Processing Systems},
year={2021},
url={https://openreview.net/forum?id=Aeo-xqtb5p}
}